Coronal Hole Detection
Coronal Hole Detection is carried out using a two-threshold region growing algorithm.
Algorithm
1 2 3 4 5 6 7 8 9 10 11 12 13 | |
- 1.) viable pixels are checked to see if the intensity level is below threshold 1
- if so, pixel is marked
- 2.) in each iteration, pixels are checked if their intensity is between threshold 1 and 2, and if they have
the required number of connected pixels
- if so, pixel is marked
- 3.) continues until no more pixels are marked
Example Maps
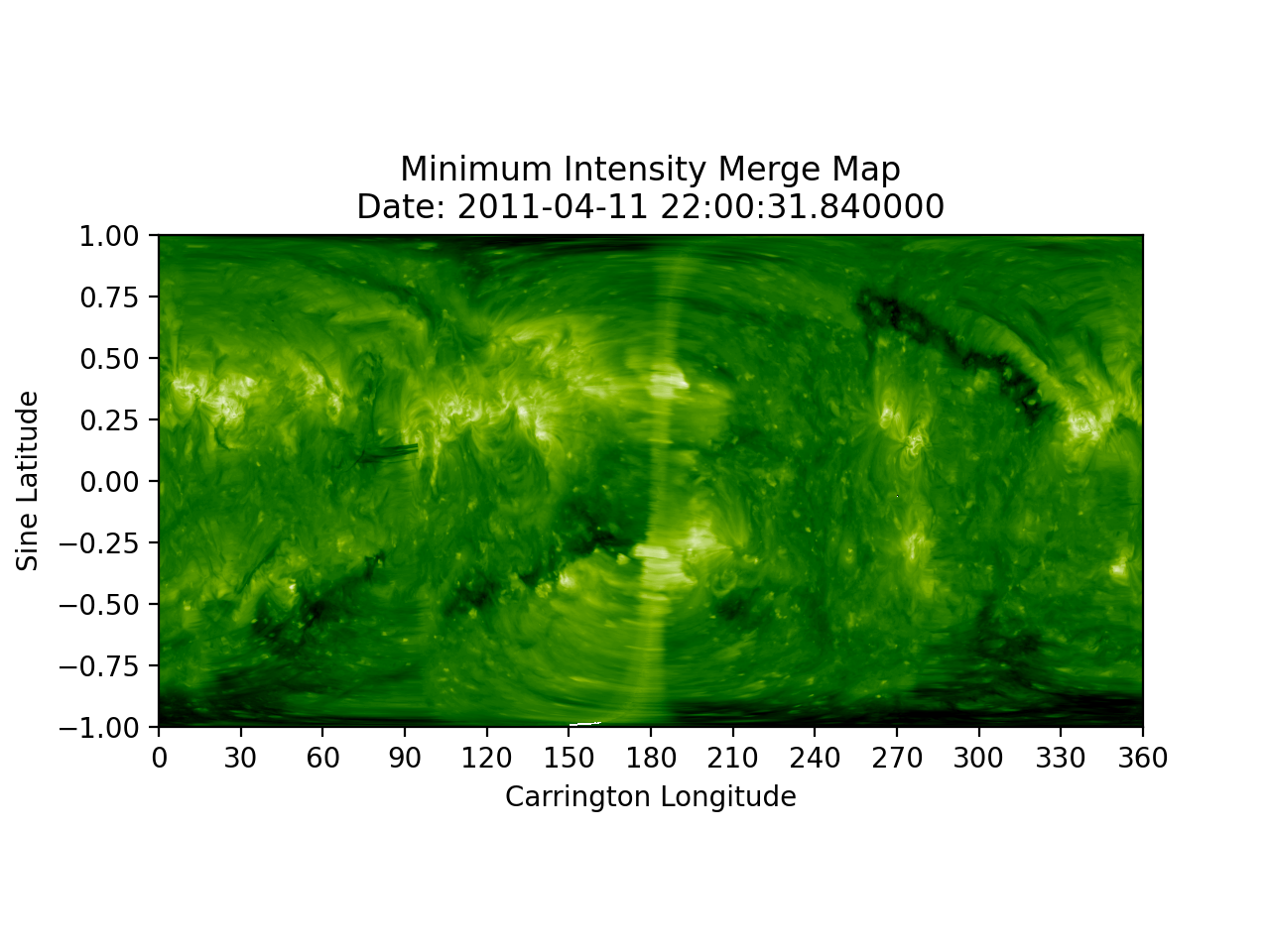
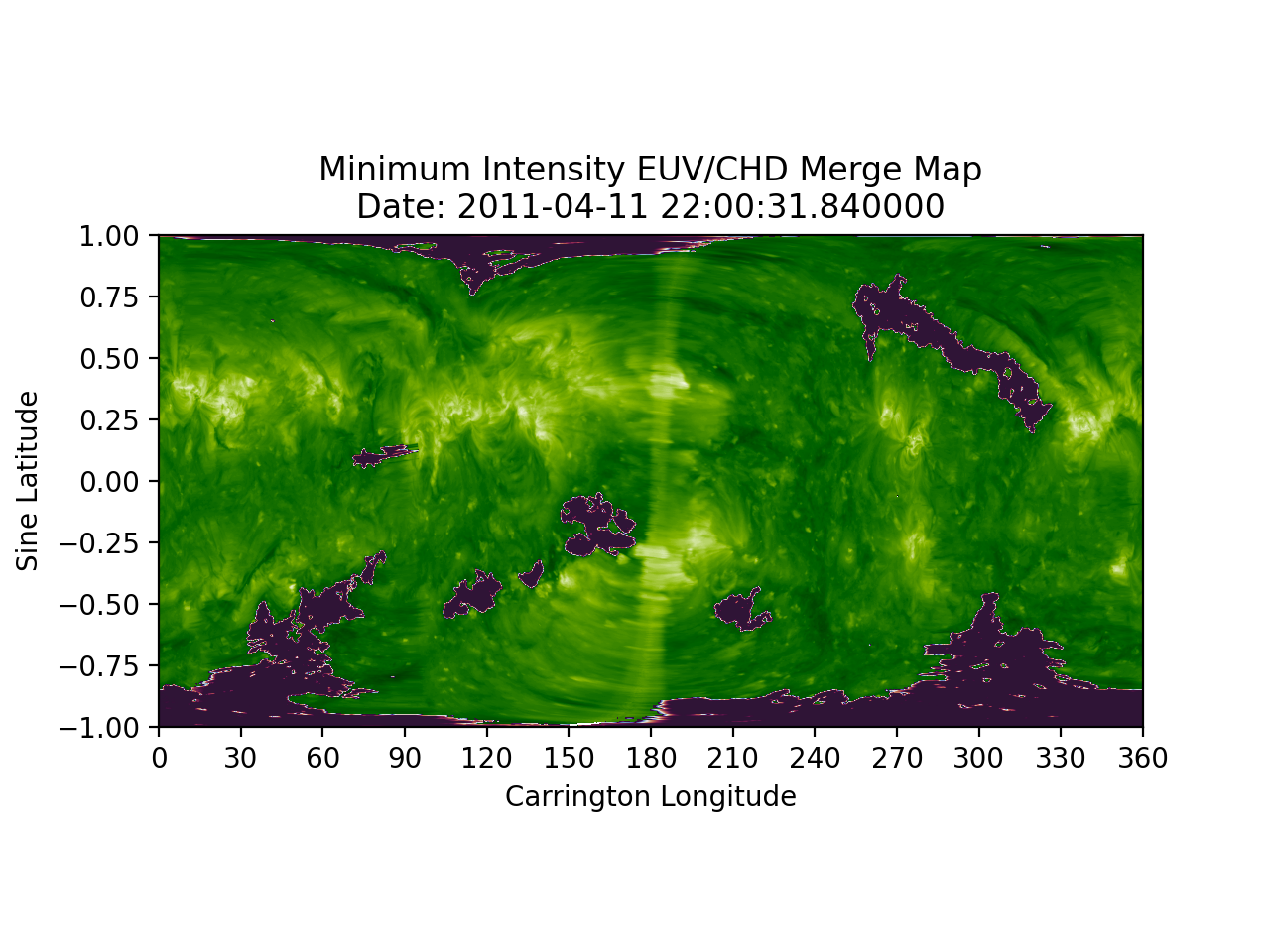
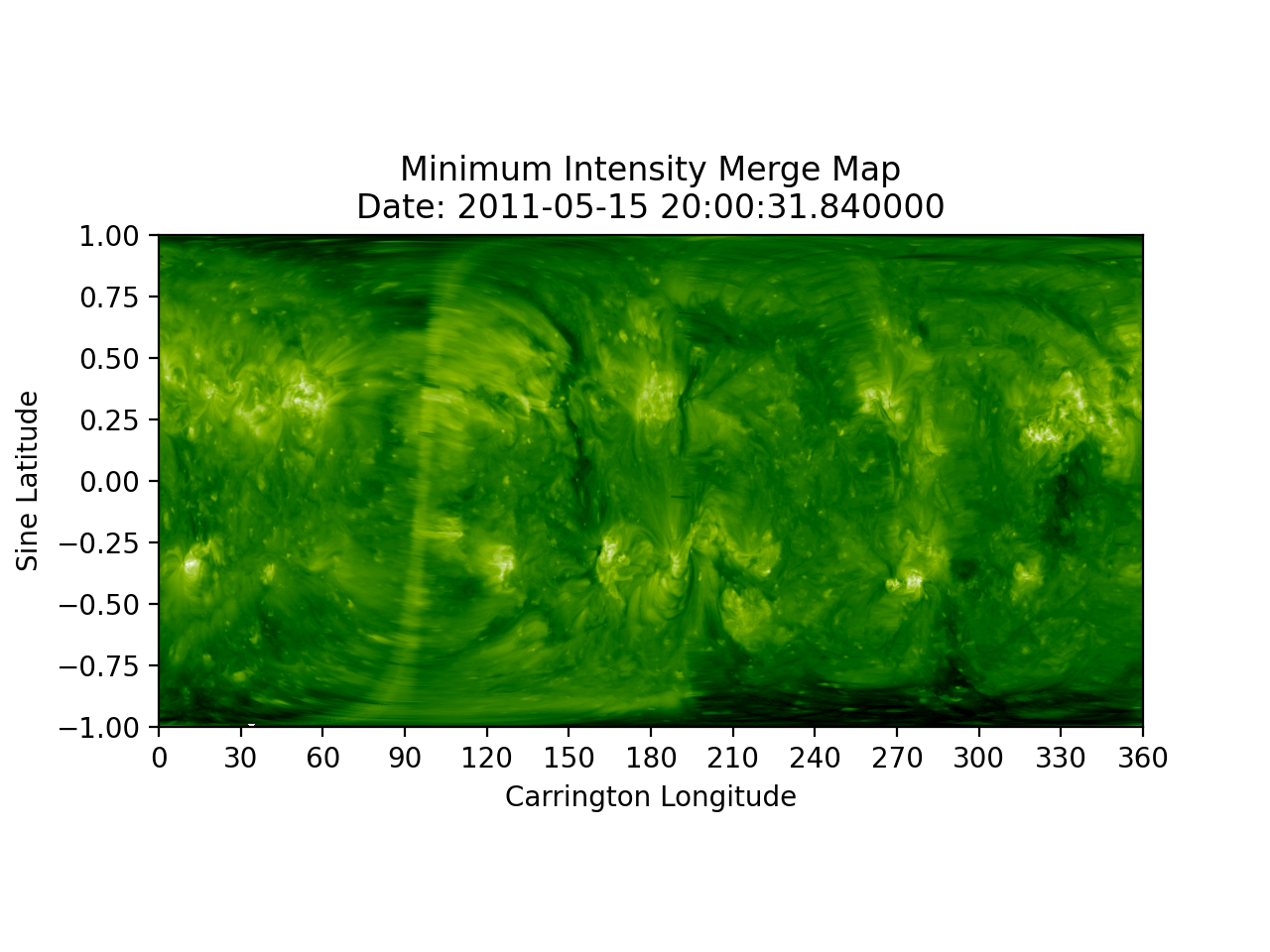
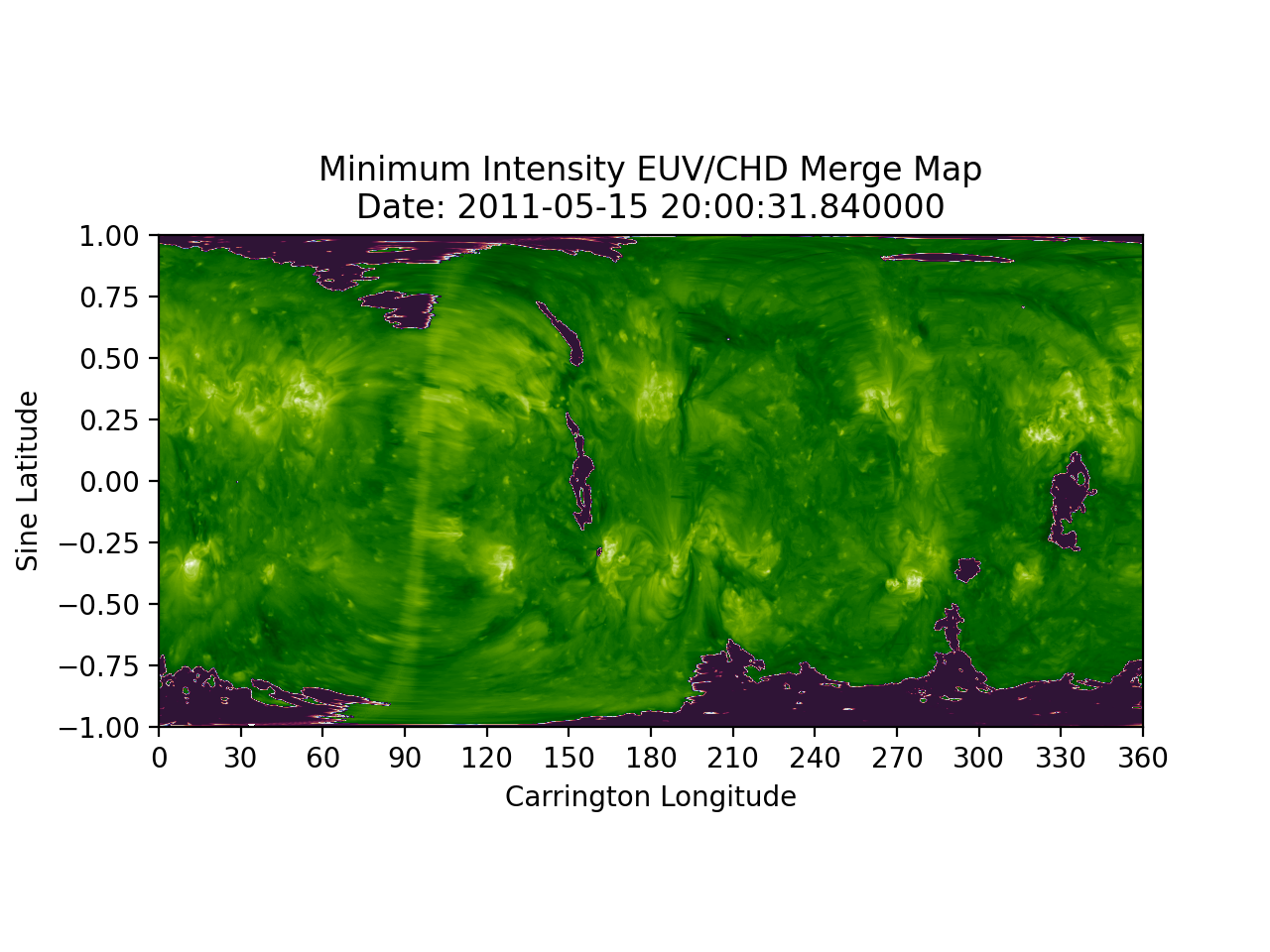
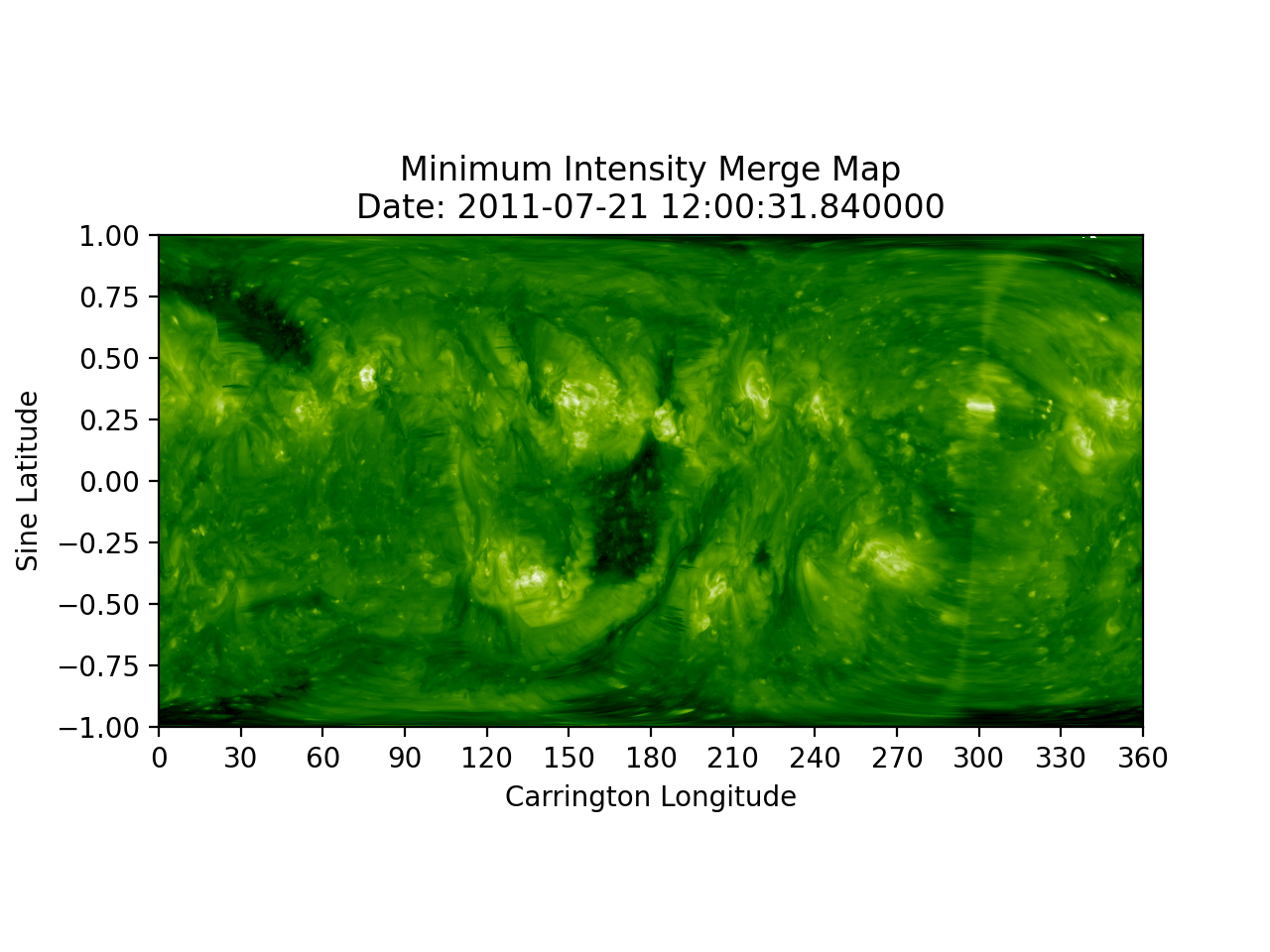
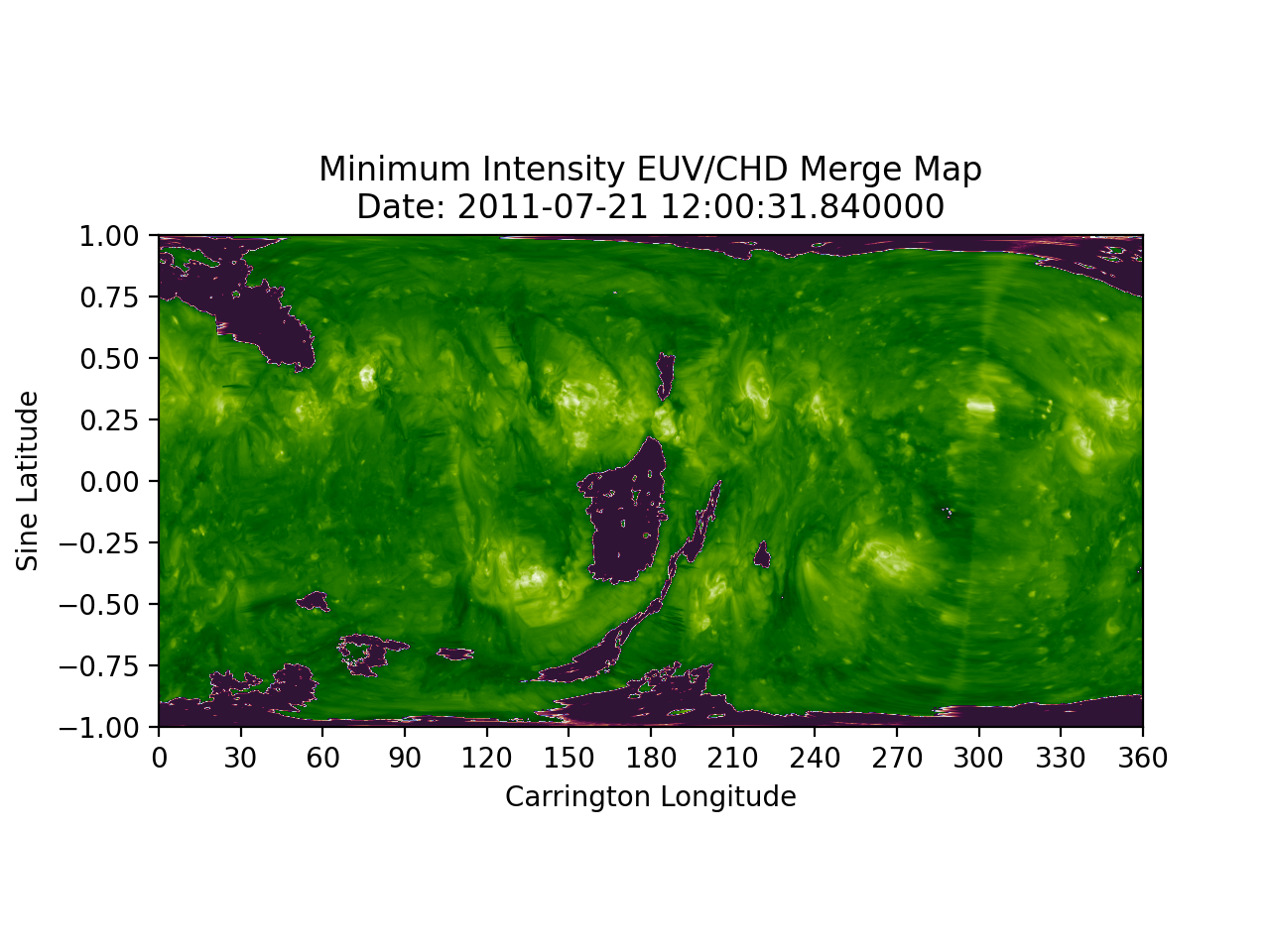
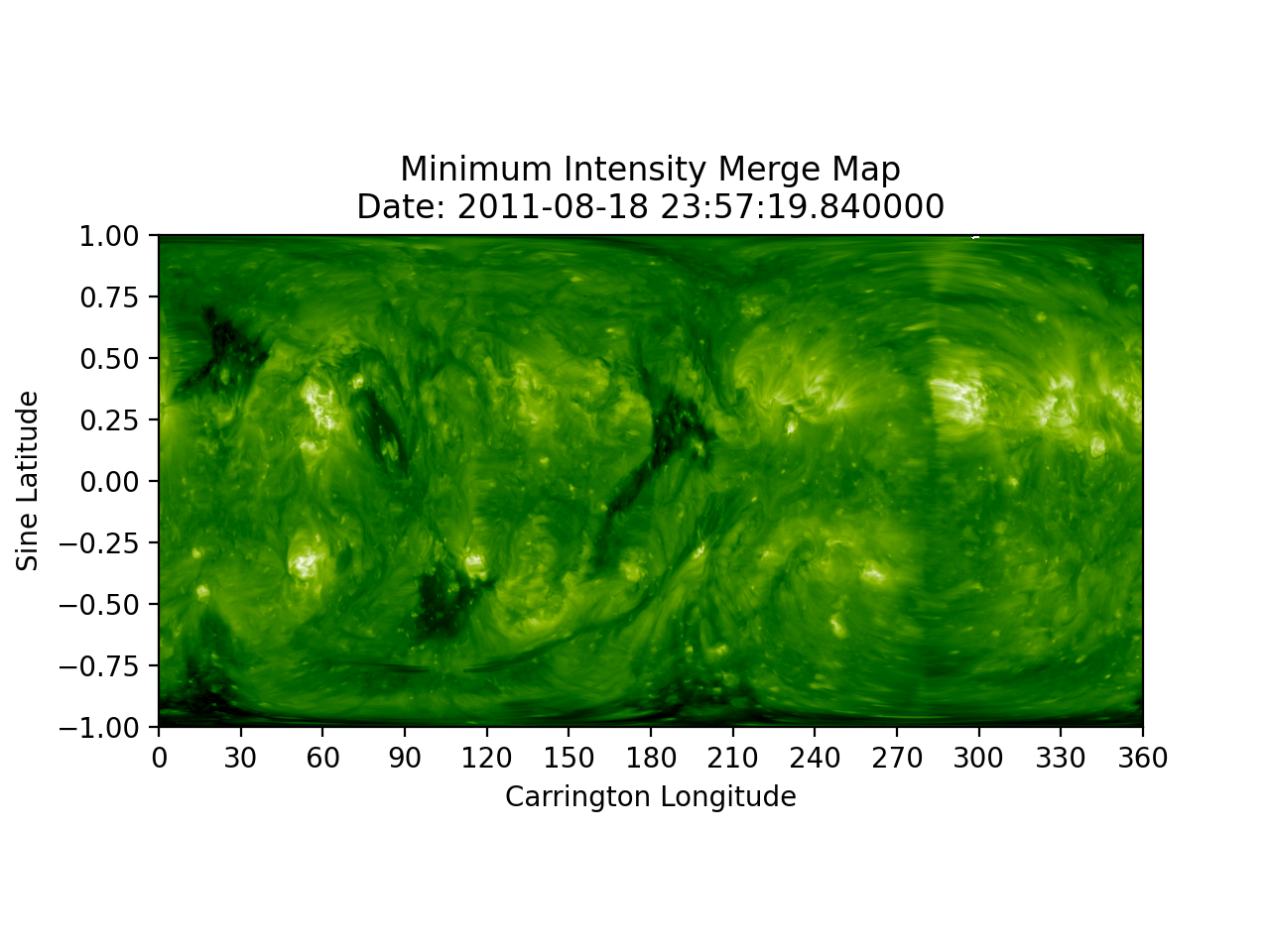
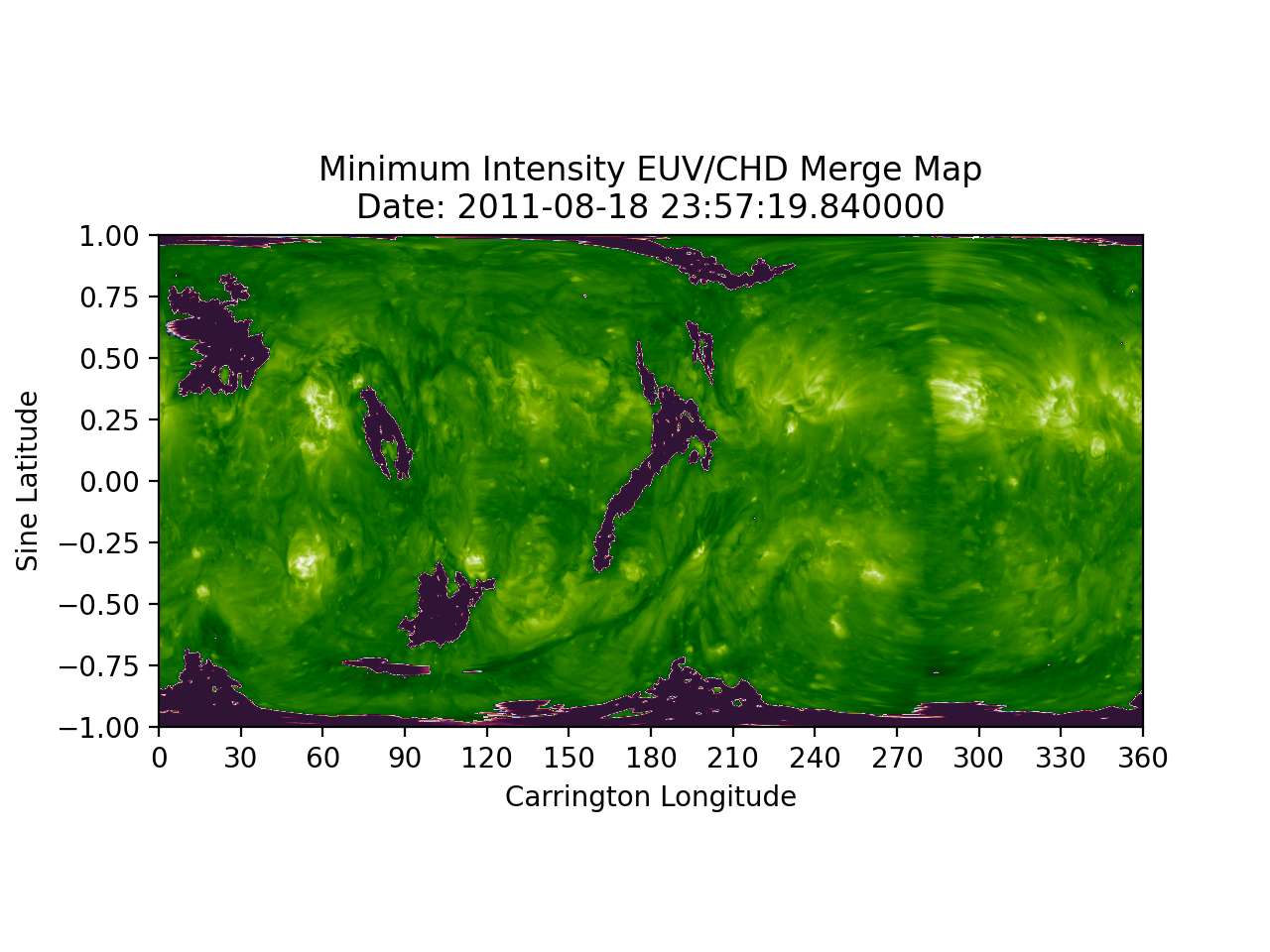
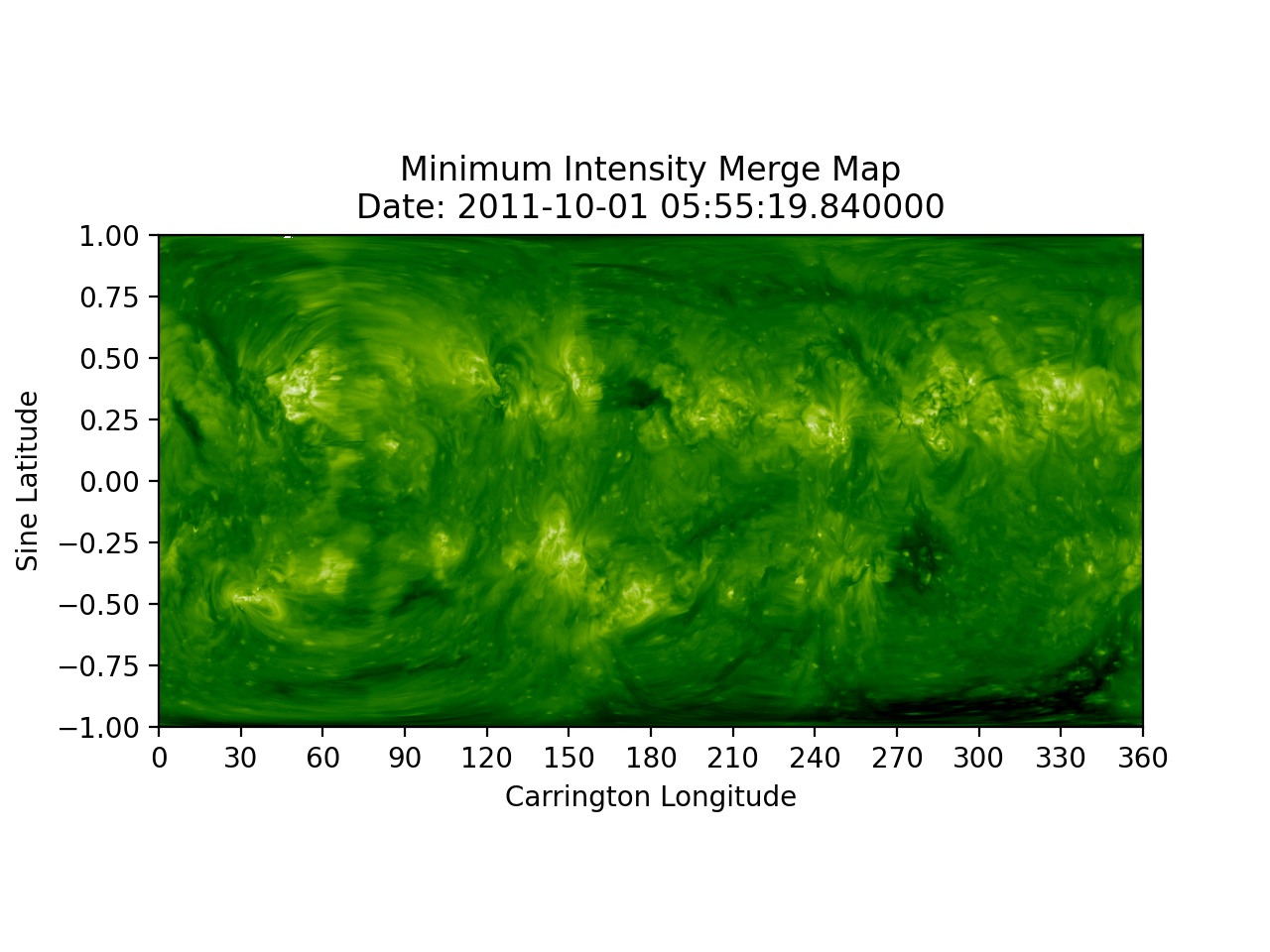
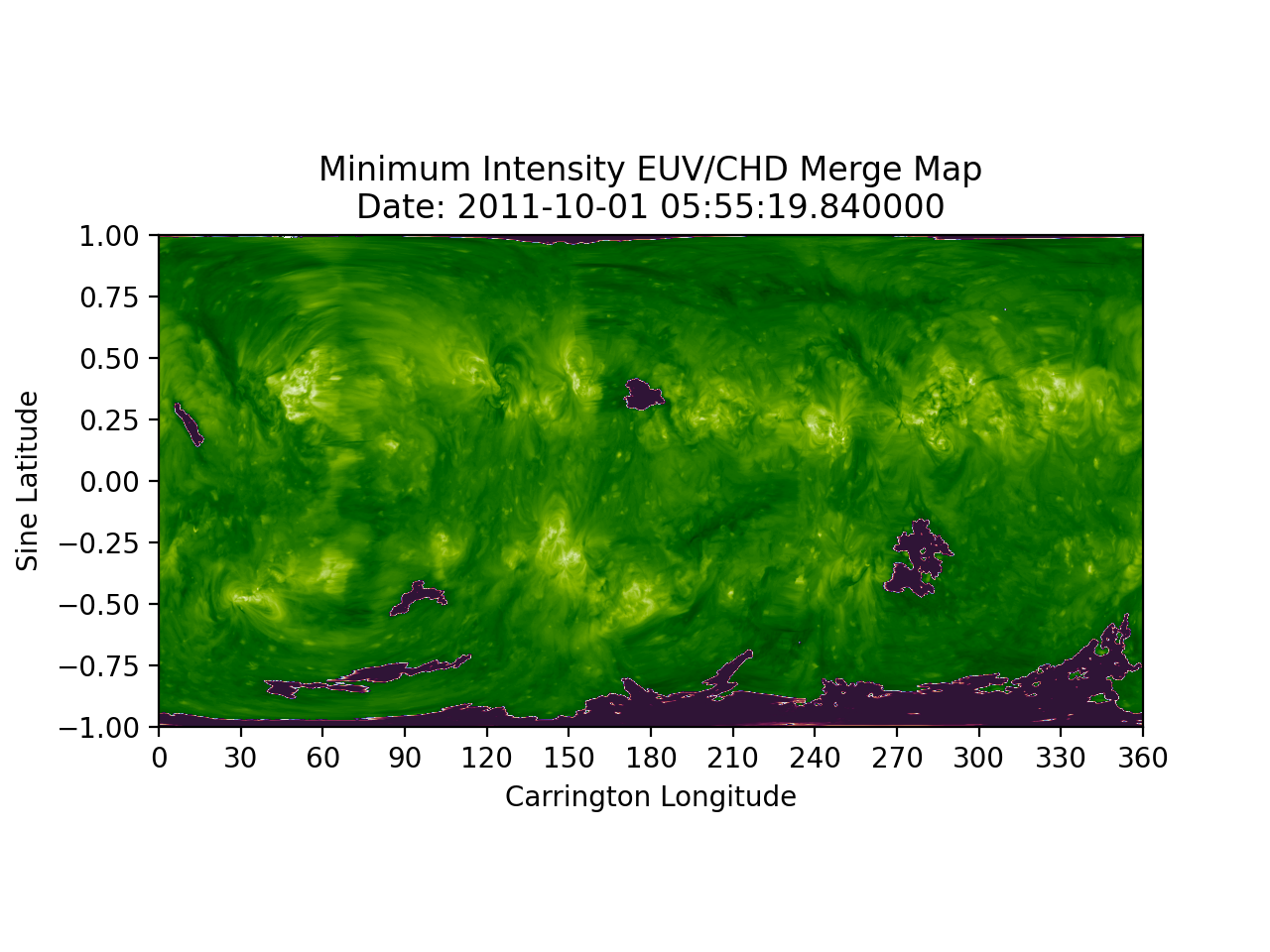
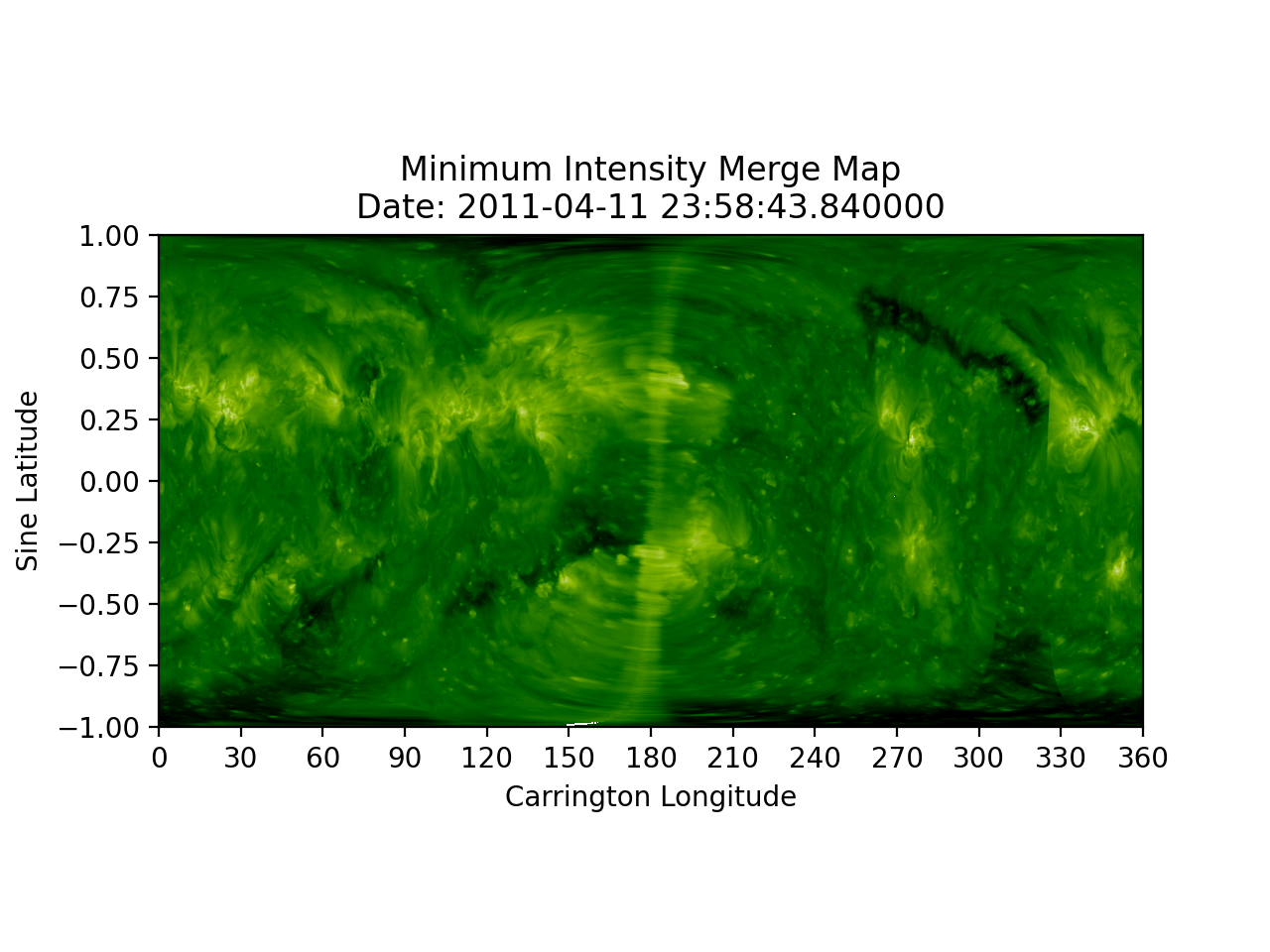
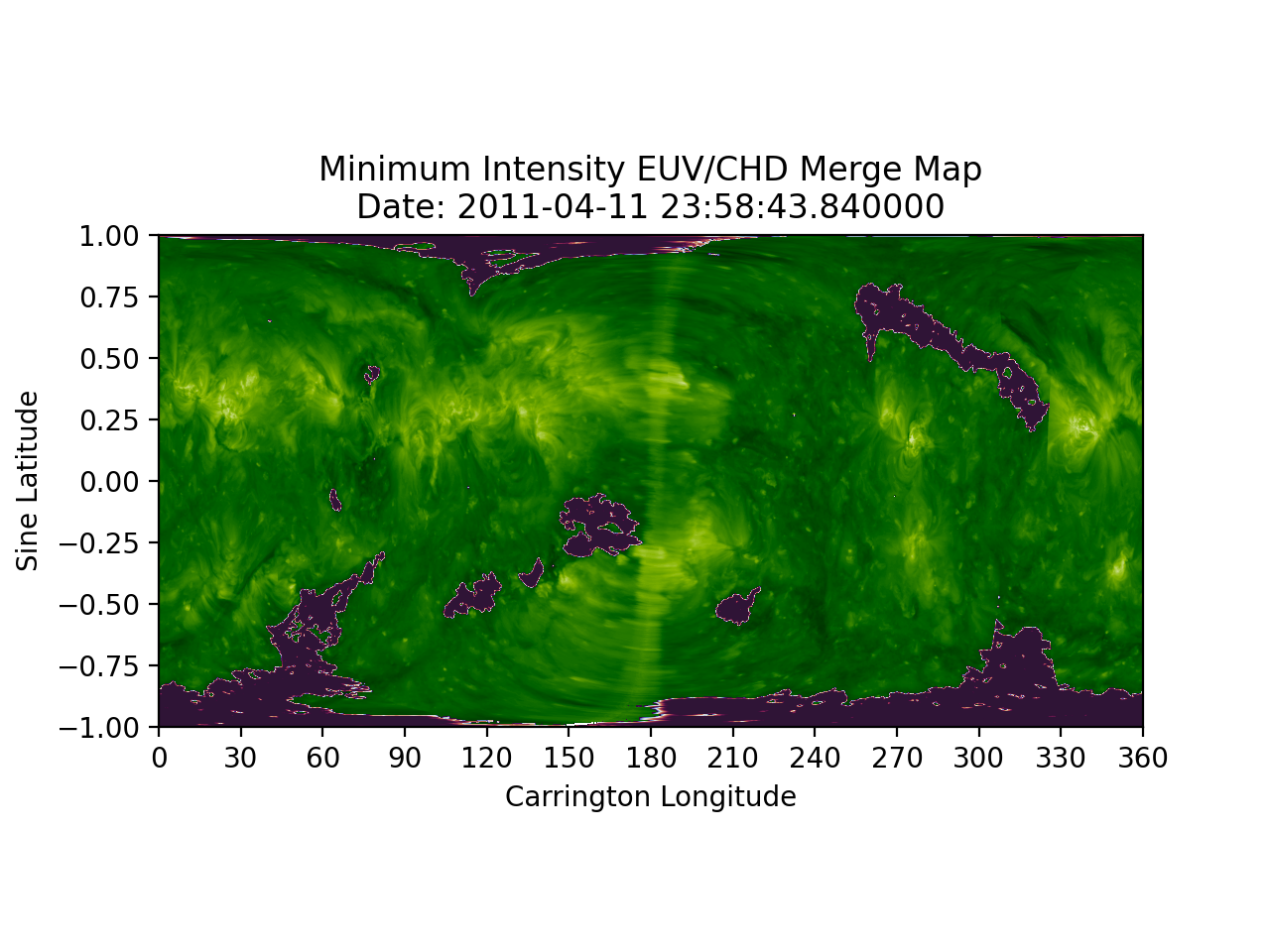
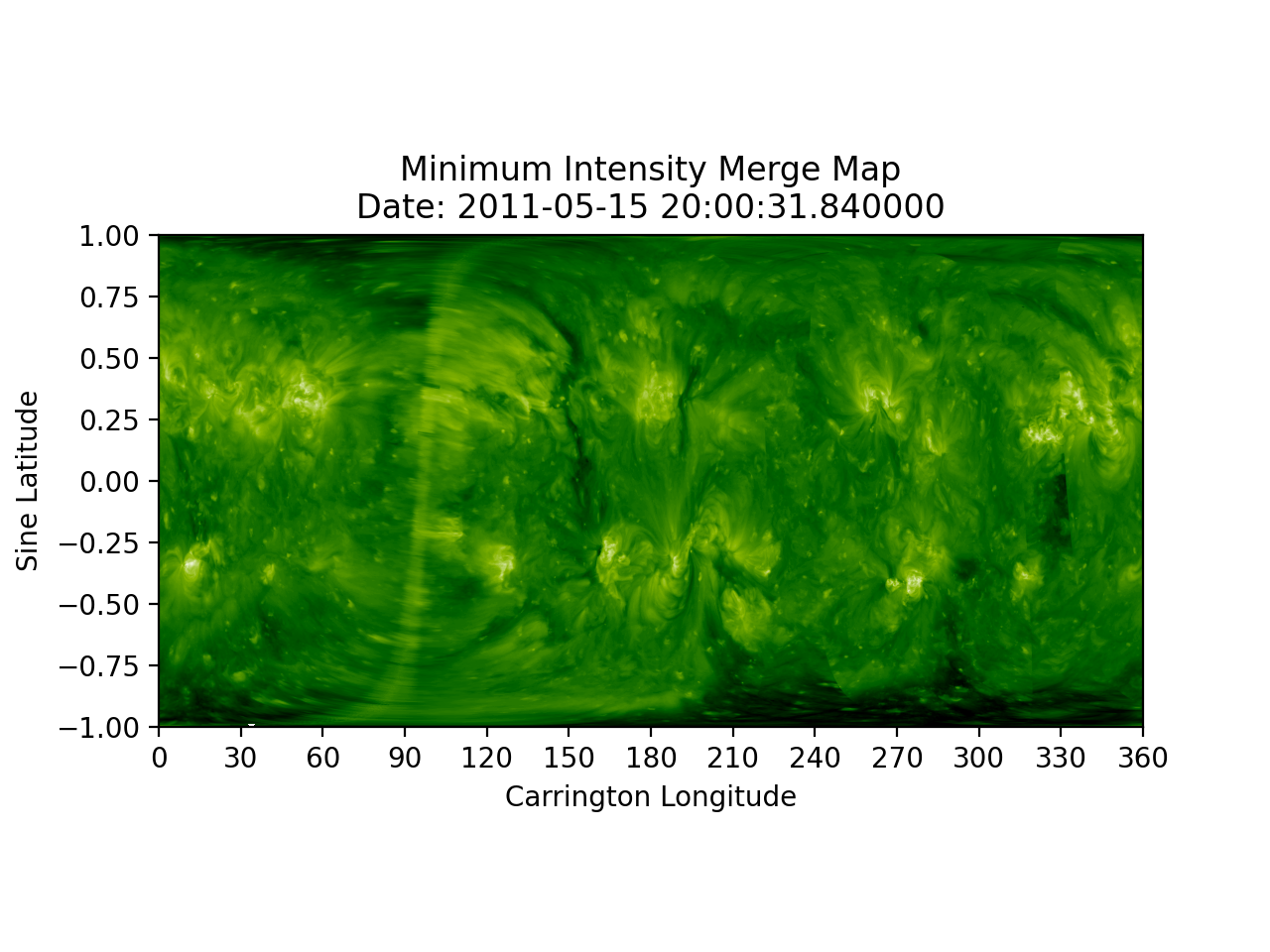
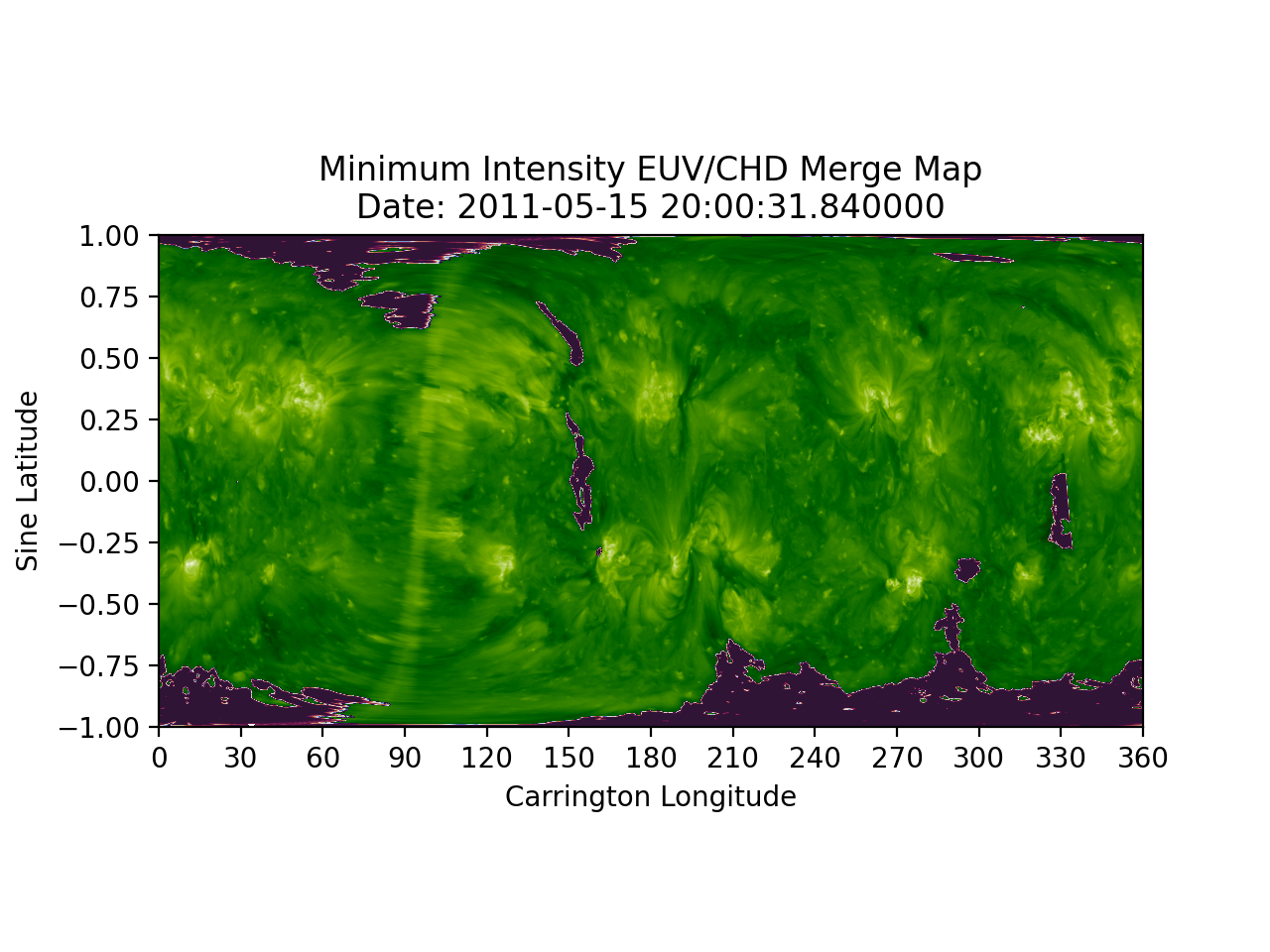
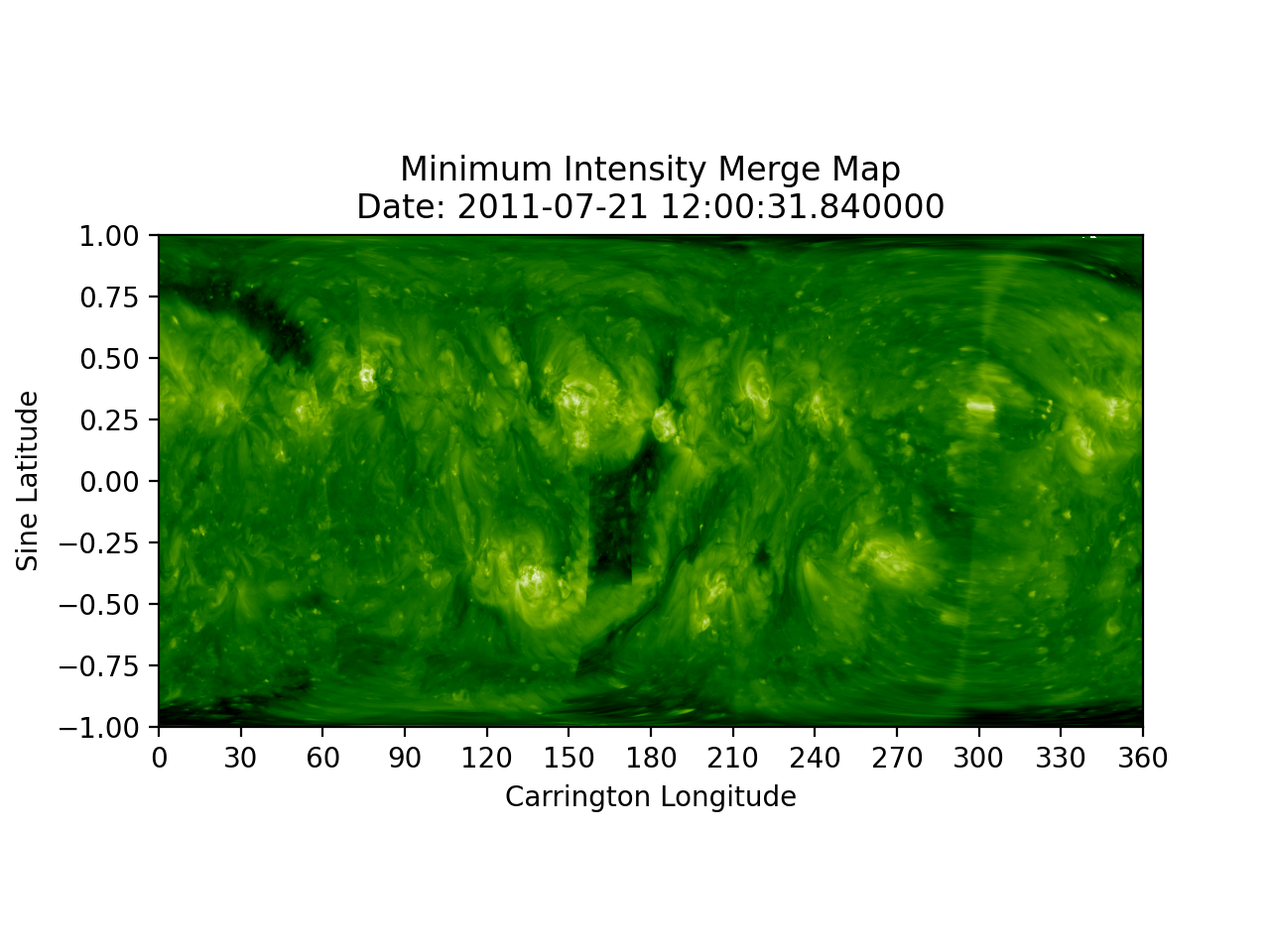
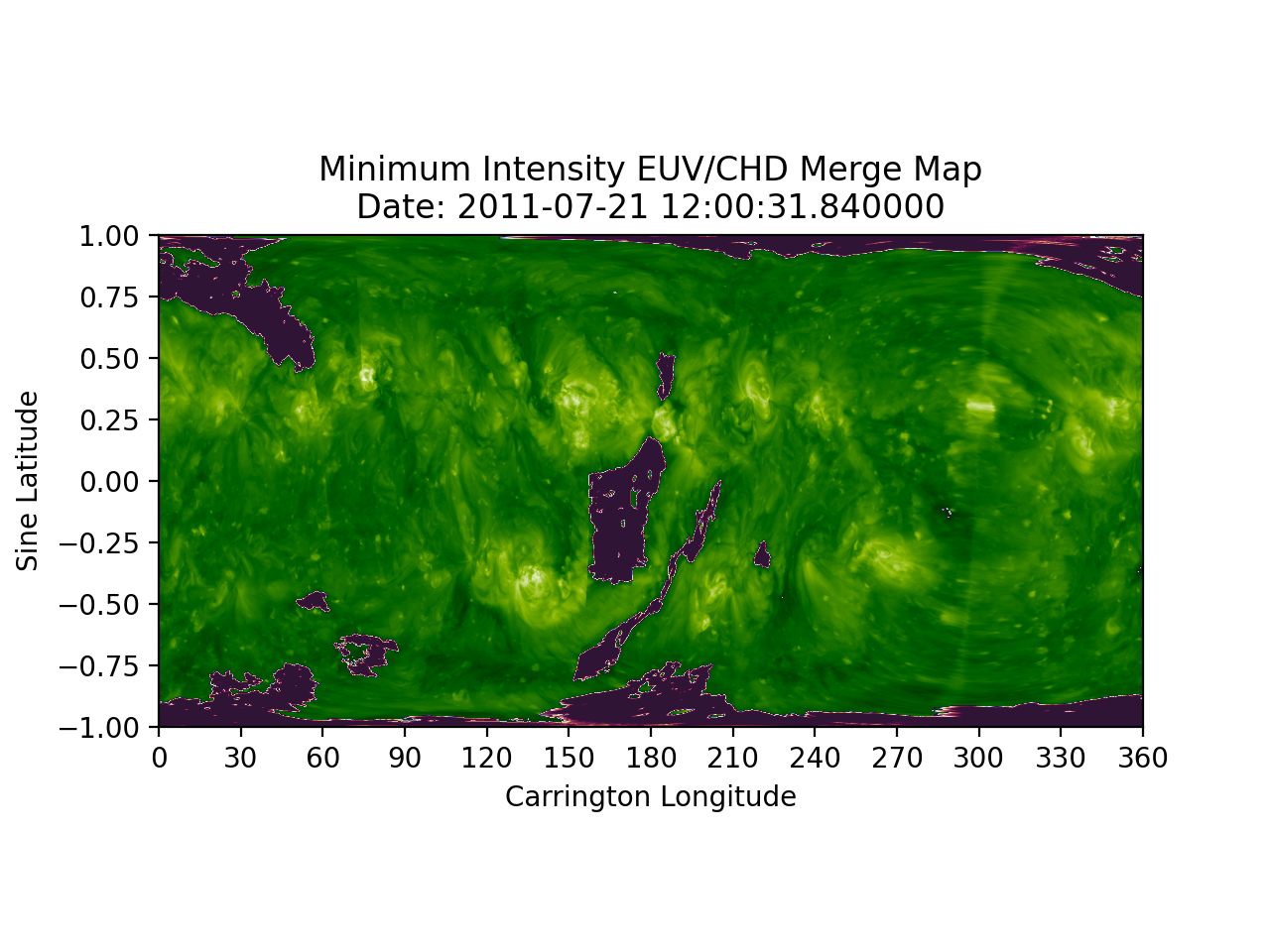
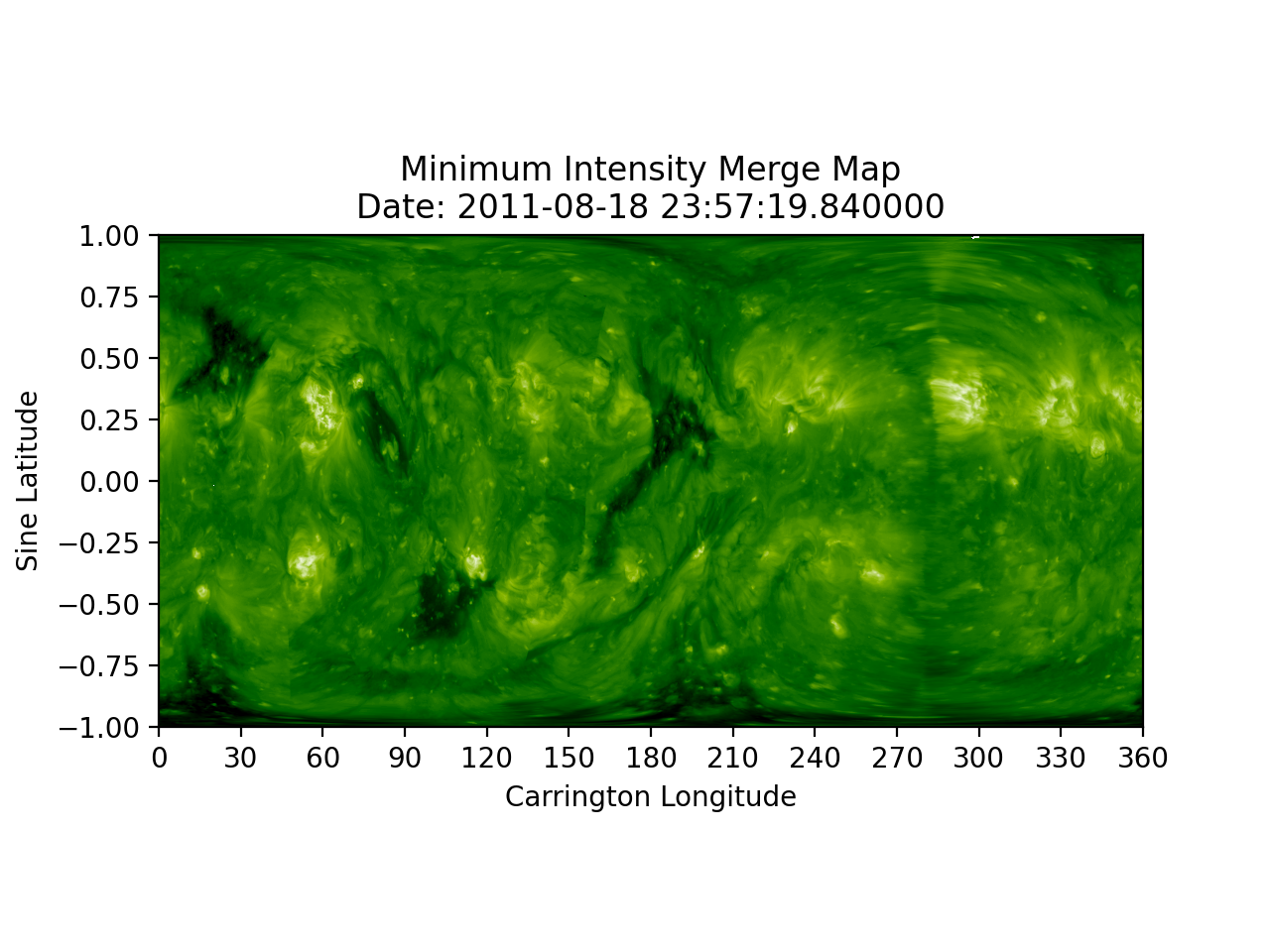
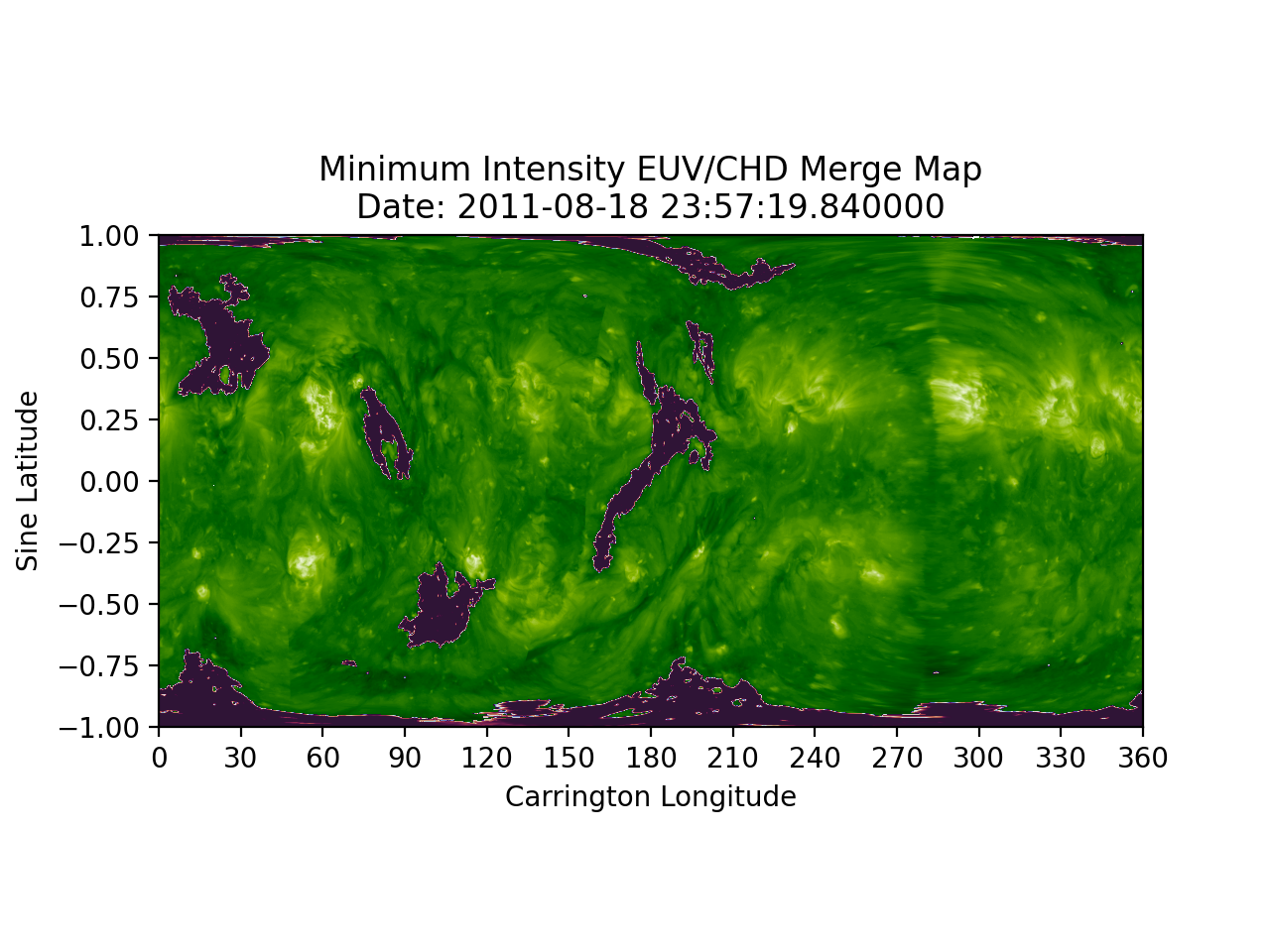
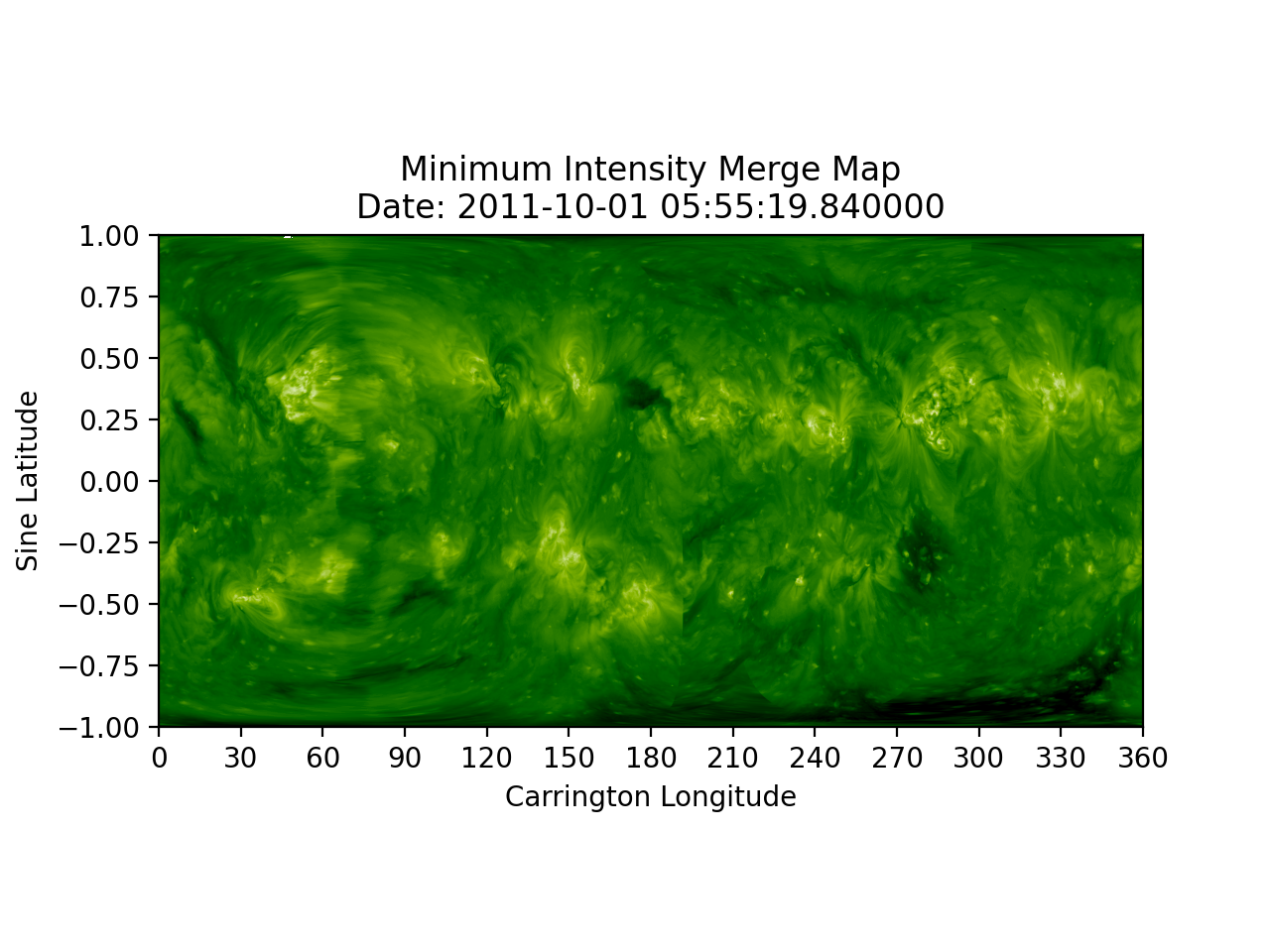
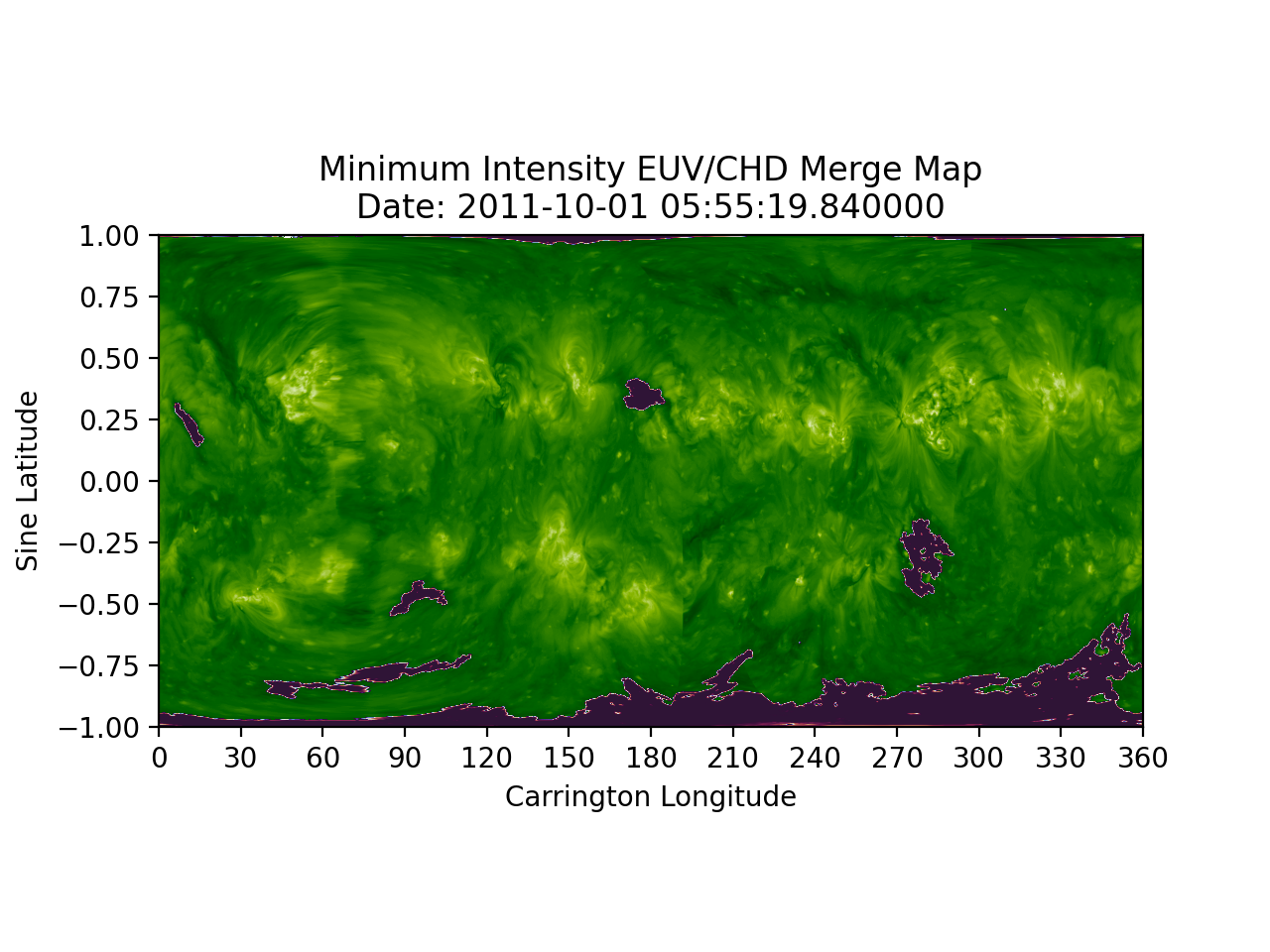
Example minimum intensity merge maps with and without Coronal Hole Detection overlaid. You can click on image titles to enlarge images. Maps with both methods of minimum intensity merge are shown.
Minimum Intensity Merge with Two Threshold Mu Cutoff Values
April 11, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
May 15, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
July 21, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
August 18, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
October 1, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
Minimum Intensity Merge based on Maximum Mu Value
April 11, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
May 15, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
July 21, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
August 18, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |
October 1, 2011
| EUV Map | Combined EUV/CHD Map |
|---|---|
 |
 |