Gaussian Varying Threshold Parameters
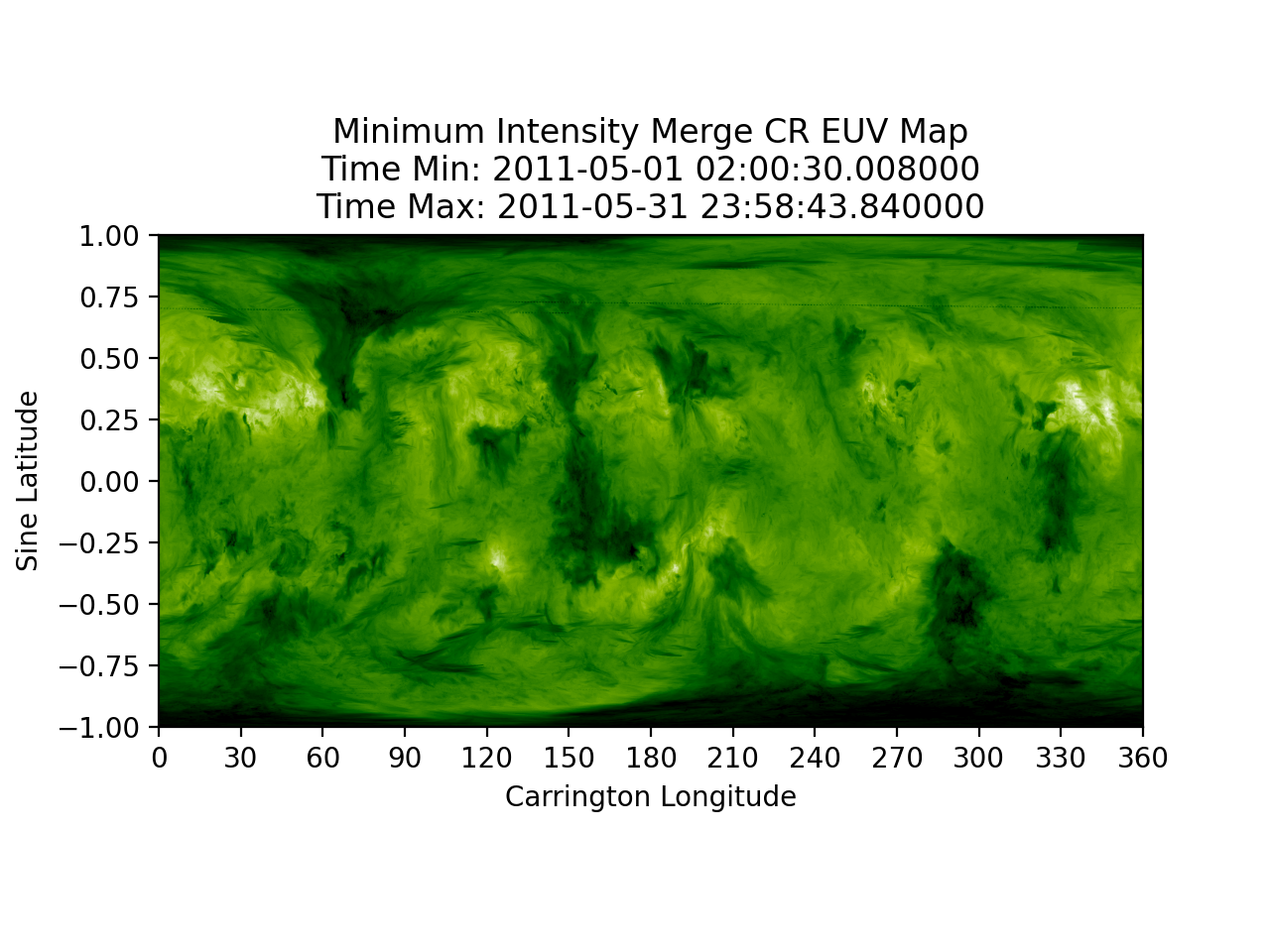
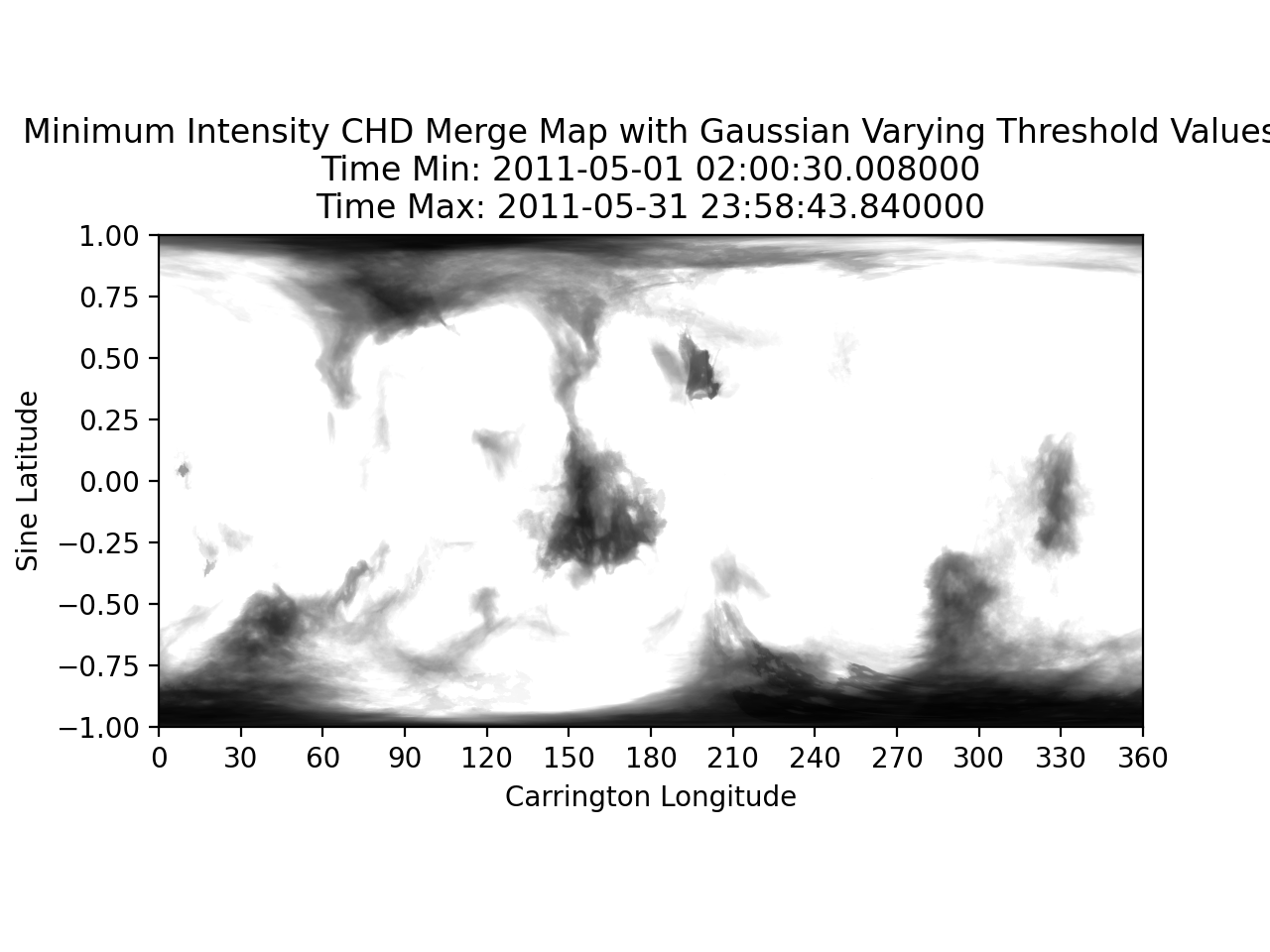
These maps are created using varying CHD Threshold parameters. The threshold is varied based off a Gaussian distribution with a user inputted value of sigma (sigma=0.15) and thresholds for each image are randomly selected. The only different data product produced here is the Coronal Hole Detection map, the EUV map is the same as the synoptic EUV maps created.
In these Gaussian weighted CHD Maps, coronal hole detections are weighted to produce a probability type map just as in the synoptic CHD Maps.
The code for these maps is found here.
Example Maps
EUV Map
CHD Map
Code Outline
1 2 3 4 5 6 7 | |
- 1.)
db_funcs.query_euv_images- query the database for images based off the time range and center date
- 2.)
chd_funcs.get_inst_combos- query the appropriate combo ids for each instrument based off the maximum time range the user inputted
- 3.)
cr_funcs.apply_ipp- apply image pre-processing corrections
- 4.)
dp_funcs.gauss_chd- apply Coronal Hole Detection algorithm based on gaussian weighted threshold parameters
- 5.)
cr_funcs.create_map- convert the image and detection to a map
- 6.)
cr_funcs.cr_map- add image to synoptic map
- 7.)
dp_funcs.save_threshold_maps- plot and save varying threshold map to database with included methods